Устройство вертолета - Управление несущим винтом (часть 2)
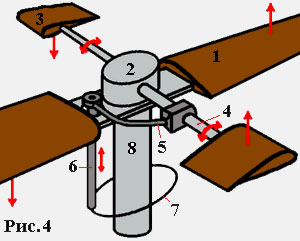
Наряду с классической системой, существуют и оригинальная модификация системы управления несущим винтом (рис.4 – Автомат перекоса Хиллера). Она состоит из двух дополнительных укороченных лопастей, расположенных под углом 90° к основным в плоскости вращения несущего винта.
Лопасти несущего винта -1 жестко закреплены на втулке, подвешенной на валу, на кардановом подвесе - 2. Управляющие укороченные лопасти -3 жестко скреплены со стержнем - 4, проходящим также через втулку - 8 винта. Стержень может поворачиваться при помощи поводка - 5, связанного тягой - 6 с тарелкой автомата перекоса - 7. Пилот изменяет наклон тарелки, после чего меняются углы установки управляющих лопастей. Одна из них поднимается, вторая опускается. Это приводит к изменению угла установки лопастей несущего винта, изменяются их углы атаки. Одна поднимается, другая опускается. В результате, плоскость вращения лопастей меняет наклон, что вызывает поворот вектора тяги несущего винта. Таким образом, посредством управляющего рычага пилот воздействует на вспомогательные лопасти, которые, в свою очередь, управляют основными лопастями, наклоняя втулку несущего винта. В итоге, конус несущего винта наклоняется в требуемом направлении полета. Так как ручка управления пилота изолирована от НВ, то все силы обратной связи минимальны. Использование этой системы в некоторой степени упростило управление вертолетом и позволило получить ряд преимуществ: простота конструкции, удобство в эксплуатации, экономия в весе.
В серии вертолетов БЕЛЛ применен оригинальный автомат перекоса. В нем тяги автомата перекоса воздействуют на рычаги, поворачивающие на определенный угол всю конструкцию двухвинтового НВ, прикрепленного к валу карданным подвесом. При изменении угла установки тарелки автомата перекоса наклоняется плоскость вращения НВ, вследствие чего формируется движущая сила.

 Наряду с классической системой, существуют и оригинальная модификация системы управления несущим винтом (рис.4 – Автомат перекоса Хиллера). Она состоит из двух дополнительных укороченных лопастей, расположенных под углом 90° к основным в плоскости вращения несущего винта.
Наряду с классической системой, существуют и оригинальная модификация системы управления несущим винтом (рис.4 – Автомат перекоса Хиллера). Она состоит из двух дополнительных укороченных лопастей, расположенных под углом 90° к основным в плоскости вращения несущего винта.