Устройство вертолета - Управление несущим винтом (часть 1)
Управление вертолетом в пространстве осуществляется изменением направления тяги НВ, а также изменением силы тяги рулевого винта. Управляют направлением и силой тяги НВ автоматом перекоса, изобретенным нашим великим соотечественником Б.Н. Юрьевым в 1911 году.
Автомат перекоса представляет собой устройство управления общим (изменяющим силу тяги) и циклическим (изменяющим направление тяги) шагом НВ. Другими словами, автомат перекоса лопастей позволяет изменять силу тяги и направление тяги НВ. Основное назначение автомата перекоса - передача движения с неподвижных элементов системы управления на вращающиеся лопасти НВ.
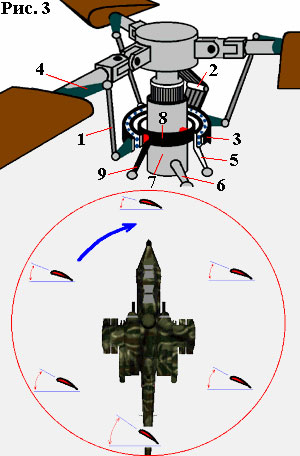
В общих чертах, автомат перекоса устроен следующим образом (рис.3). Вал НВ проходит внутри направляющей ползуна общего шага. По направляющей перемещается ползун 7 с шарнирно присоединенным к нему внутренним невращающимся кольцом 8, а также качалками продольного и поперечного управления. Внутреннее кольцо связано подшипником с наружным вращающимся кольцом 3, которое может отклоняться в двух плоскостях. Наружное кольцо (тарелка) автомата перекоса приводится во вращение поводком 2, соединенным с валом НВ. Концевые шарниры вращающейся тарелки связаны тягами 1 с рычагами 4 поворота лопастей.
Автомат перекоса управляется гидроусилителями, воздействующими на тяги поперечного 5 и продольного 9 управления, а также на рычаг управления общим шагом 6. При отклонении рычага общего шага ползун автомата перекоса движется вверх или вниз по направляющей, при этом все вертикальные тяги перемещаются на одинаковые расстояния и поворачивают с помощью рычагов все лопасти на угол. Управление общим шагом лопастей НВ сопровождается синхронным изменением мощности двигателей.
При отклонении тяги продольного управления внутреннее невращающееся кольцо автомата перекоса поворачивается на угол, что вызывает поворот наружного вращающегося кольца в том же направлении на тот же угол. Благодаря этому при вращении НВ вертикальные тяги перемещаются вверх — вниз на различные расстояния и поворачивают с помощью рычагов лопасти на различный в каждом азимутальном положении угол. В динамике, циклический шаг выглядит так (рис.3 внизу). В некотором азимутальном положении угол установки лопасти минимальный, затем по мере ее вращения этот угол возрастает, достигая через пол-оборота НВ максимального значения. В течение следующей половины оборота НВ угол уменьшается до исходного минимального значения. В итоге, значение (сила) тяги становится неодинаковой в противоположных азимутах плоскости вращения НВ, благодаря чему изменяется положение в пространстве плоскости вращения НВ, что в свою очередь заставляет вертолет двигаться в горизонтальной плоскости. Аналогичным образом изменяется угол установки лопастей при отклонении тяги поперечного управления на угол. Так происходит управление циклическим шагом НВ (цикл изменения угла установки лопасти соответствует обороту НВ). ------------------------------------------------------------

 Управление вертолетом в пространстве осуществляется изменением направления тяги НВ, а также изменением силы тяги рулевого винта. Управляют направлением и силой тяги НВ автоматом перекоса, изобретенным нашим великим соотечественником Б.Н. Юрьевым в 1911 году.
Управление вертолетом в пространстве осуществляется изменением направления тяги НВ, а также изменением силы тяги рулевого винта. Управляют направлением и силой тяги НВ автоматом перекоса, изобретенным нашим великим соотечественником Б.Н. Юрьевым в 1911 году.